
Ros Tutorial. The unified robotic description format (urdf) is an xml file format used in ros to describe all elements of a robot. It mainly targets c++ and python development and uses catkin build system, which is based on cmake with python scripts.

For quick solutions to more specific. // ros/ros.h rosに関する基本的なapiのためのヘッダ #include ros/ros.h // comp_tutrial/adder.h adder.msgから生成されたメッセージを定義しているヘッダ #include comp_tutorial/adder.h int main (int argc, char ** argv) {// 初期化の The unified robotic description format (urdf) is an xml file format used in ros to describe all elements of a robot.
For Completeness, This Article Shall Discuss The Steps On Ubuntu 16.04 Xenial Xerus.
// ros/ros.h rosに関する基本的なapiのためのヘッダ #include ros/ros.h // comp_tutrial/adder.h adder.msgから生成されたメッセージを定義しているヘッダ #include comp_tutorial/adder.h int main (int argc, char ** argv) {// 初期化の It mainly targets c++ and python development and uses catkin build system, which is based on cmake with python scripts. Ros tutorial this tutorial will try to explain in a simple way how you can manage to have coppeliasim ros enabled, based on ros melodic and catkin build.
Measuring Temperature Using The Tmp102.
First of all you should make sure that you have gone through the official ros tutorials, at least the beginner section, and that you have installed the catkin tools. Build system, which is based on cmake with python scripts. This tutorial shows how to generate message header files for using new message packages with rosserial (i.e.
For Quick Solutions To More Specific Questions, See The.
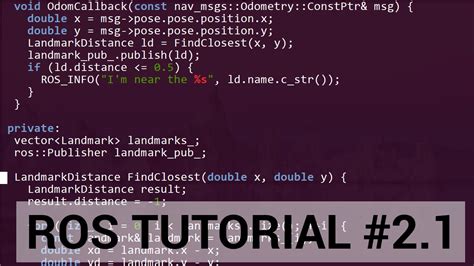
Ros a short ros tutorial for beginners this guide is a short version of ros tutorial for beginner which lists useful terms, packages, and commands for quickly understand about the basic of ros. Writing publisher & subscriber in c++ros tutorials official website: Monitor a push button and publish its state in ros.
For Quick Solutions To More Specific.
The best way to approach the tutorials is to walk through them for the first time in order, as they build off of each other and are not meant to be comprehensive documentation. Robot operating system tutorial #01introduction and preparation before we install the ros#ros #rostutorials #learnros if you have any question, feel free to. Ros setup tutorial ros (robot operating system) is a set of libraries and tools designed for robot applications.
How To Add Custom Message Type To Your Application With Rosserial).
Using a urdf in gazebo. The best way to approach the tutorials is to walk through them for the first time in order, as they build off of each other and are not meant to be comprehensive documentation. As always, start by sourcing your setup files in a new terminal, as described in the previous tutorial.
